
 |
| Raspberry Pi als Datenlogger |
Im letzten Teil des Projektes "Raspberry Pi als Datenlogger" habe ich einen Raspberry Pi als Datenlogger für unterschiedliche Sensoren konfiguriert. Als Schnittstelle dient der I²C Bus und die RS232 Leitungen, an denen die Sensoren angeschlossen sind. Die Sensoren waren ein HYT939 (Luftfeuchtigkeit und Temperatur), ein BME280 (Luftdruck, Luftfeuchte und Temperatur) sowie ein Ultimate GPS Board an der seriellen Schnittstelle. Der Raspberry Pi ist dabei in eine Box eingebaut, wird mit einer Powerbank, die sich ebenfalls in der Box befindet, versorgt und stellt als Schnittstelle eine 8 polige RJ45 Buchse mit I²C und RS232 nach aussen zur Verfügung. An diese Buchse können dann die Sensoren angeschlossen werden. Will man die Sensorik nun änderen, bzw. erweitern, so können einfach weitere I²C Bus - Sensoren angeschlossen werden. Es muß lediglich noch die Software (in diesem Fall Pythonscripten) angepasst werden und schon können die Daten des neuen Sensors empfangen und aufgezeichnet werden. Wie aber geht das System um, wenn der Sensor nicht über I²C spricht? Wenn zum Beispiel ein analoger Wert eingelesen werden soll? Ganz einfach: Soll die Hardware des Datenloggers nun nicht mehr modifiziert werden, so muß man einfach dafür sorgen, dass der neue Sensor, der beispielsweise analoge Spannungen ausgibt, diese an eine, nennen wir sie BlackBox weitergibt, die wiederum an ihrem Ausgang ein I²C Bussignal bereit stellt. Das kann dann wieder in das bestehende System integriert werden.
 |
| Arduino Nano als I2C Converter |
Und genau diese Aufgabe erfüllt ein Microcontroller. Praktischer Weise habe ich diesmal einen Arduino Nano dazu verwendet. Der Arduino Nano mit dem Atmega 328 besitzt ja mehrere analoge und Digitale Eingänge, sowie zwei Interrupts. Über entsprechende Libraries ist einfach das I²C Bus Protokoll zu realisieren. Somit ist das geeignete Black-Box Gerät gefunden.
Der folgende Arduino Code stellt einen einfachen I²C Bus Slave dar. Die Busadresse soll beispielsweise 0x08 sein, von einer Messung haben wir den Messwert 1.3321 erhalten. Dieser Wert soll bei Anfrage an diese Busadresse gesendet werden. Das Beispiel sieht wie folgt aus:
// I2C Slave
#include
int address = 8; //i2c busaddresse
float wert = 1.3321; // testwert .... kommt zb aus sensorberechnung
char tmp[6];
void setup() {
Wire.begin(address); // i2c adresse 0x08
Wire.onRequest(requestEvent); // register event
}
void loop() {}
void requestEvent() {
dtostrf(wert,1,3,tmp); // float "wert" in char array umwandeln
Wire.write(tmp); // char array senden
}
Im script ist eine Funktion "dtostrf" zu sehen. Sie wandelt den Inhalt einer Variable des Datentyps "floating point" in ein charakter Array um. Infos sind hier zu sehen. Im Python Interpretor des Raspberry können wir nun überprüfen, ob die Daten ankommen. Doch zuvor soll der gesamte Aufbau einmal schematisch dargestellt werden.
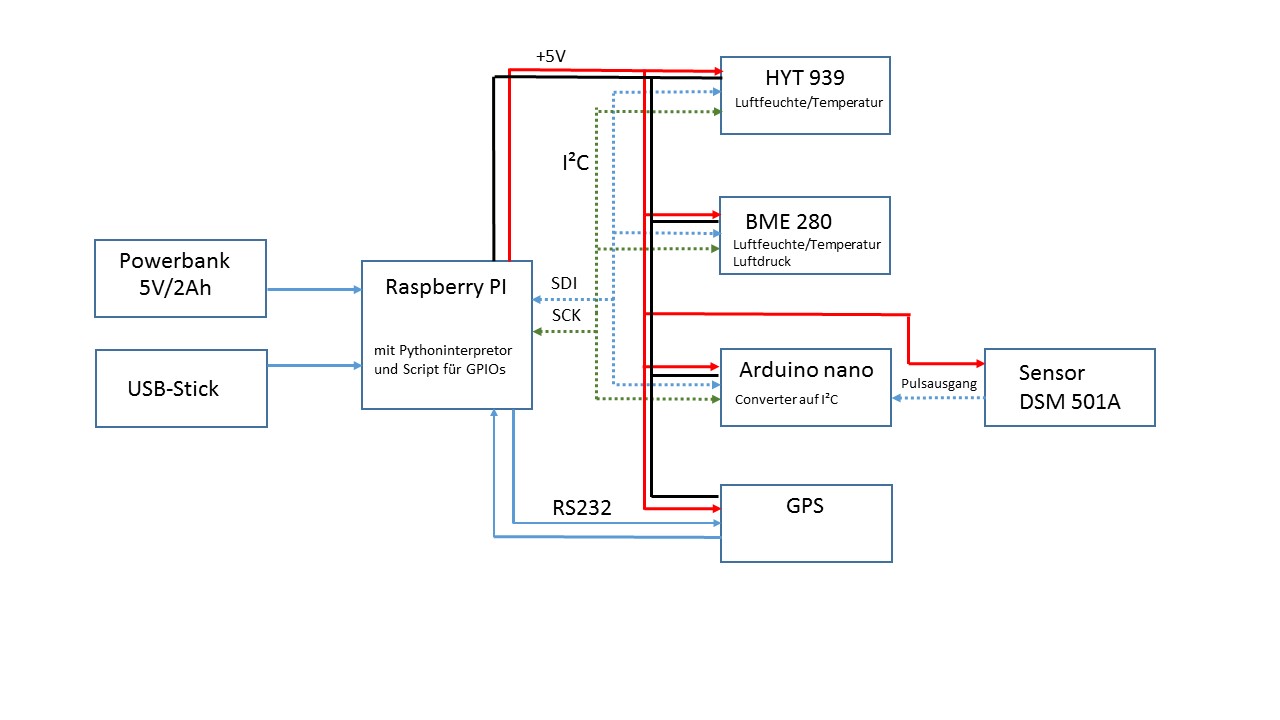 |
| Schematische Darstellung des Systems |
Sind alle Sensoren inklusive des Arduino angeschlossen, so kann das folgende Python-Script aus der Linux-Konsole des Raspberry aufgerufen werden:
# Reading data from arduino as sensor slave
# V0.1 by bihlo 09/2016
import smbus, time
bus = smbus.SMBus(1) # Raspberry Rev. 2
address = 0x08 # Fixed default address of Arduino
# Initialize sensor to acquire measurements
#def MeasurementRequest():
# void = bus.write_quick(address)
#time.sleep(0.1)
# Read from bus
def ReadMeasurement():
void= bus.write_quick(address)
time.sleep(0.1)
# Acquire 6 byte from sensor
Readout = bus.read_i2c_block_data(address,0,6)
out=''.join(chr(i) for i in Readout) #byte array von ascii in string wandeln
print "Antwort vom Arduino: ", Readout, " ."
print "Antwort als String: ", out
ReadMeasurement() |
| Partikeldetektor |
Als Sensor soll an an den Arduino ein DSM501 Dust Sensor Module angeschlossen werden. Der DSM501A ist ein Staubsensor, der mit 5V bei einer Stromaufnahme von 90mA betrieben wird. Er erkennt Partikel ab einer durchschnittlichen Größe von 1µm bei einer Konzentration von 0 bis ca. 1.4mg pro Kubikmeter Raumluft. Laut Datenblatt und Herstellerinformationen wird die Luft im Bereich der Messkammer erhitzt, sodass eine Luftzirkulation entsteht. Die sich ständig bewegende Luft wird mit einem getakteten Lichtstrahl beleuchtet. Ein in einem Winkel zur Lichtquelle angebrachter Fotodetektor empfängt nun, im Falle dass sich Partikel im Licht befinden, dessen Streulicht. Die Intensität des Streulichtes ist von der Anzahl und Größe der Partikel abhängig und kann so erfasst werden. Als Ausgangssignal erzeugt der Sensor ein Puls/Pausensignal mit einer Periode von 100ms. Das Verhältnis von High- zu Lowtime stellt nun die Grundlage für die Berechnung der Partikelanzahl bzw. -dichte dar. Über einen Countereingang des Arduino werden die Impulse gemessen und der korrespondierende Partikelwert errechnet. Dieser Wert wird nun wie oben beschrieben als Busdatum für den I2C Bus herangezogen und bei Auslösen des Bus Events übertragen. Somit hat der Arduino die Aufgabe eines einfachen Protokollkonverters übernommen. Mit dieser Methode lassen sich alle möglichen Messwerte so aufbereiten, dass der Raspberry mit einer Schnittstelle damit umgehen kann.
Wie das im Detail funktioniert und wie der Code dazu aussieht, werde ich vielleicht später einmal posten.
Wie das im Detail funktioniert und wie der Code dazu aussieht, werde ich vielleicht später einmal posten.